[V-REP] 接触点の数を変更する(ODE)
この記事でオブジェクトの接触判定は点で行なっている事がわかりました。物理エンジンがODEの場合には、オブジェクト1つあたりの接触点の最大値を変更することが可能です。
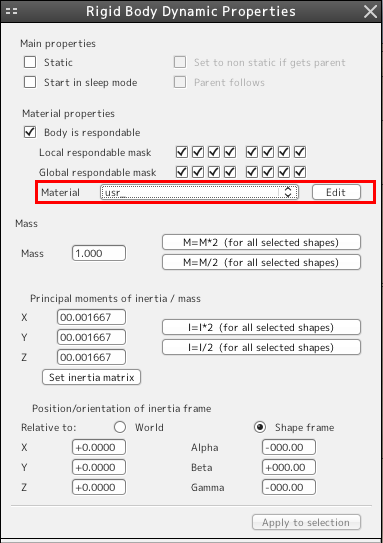
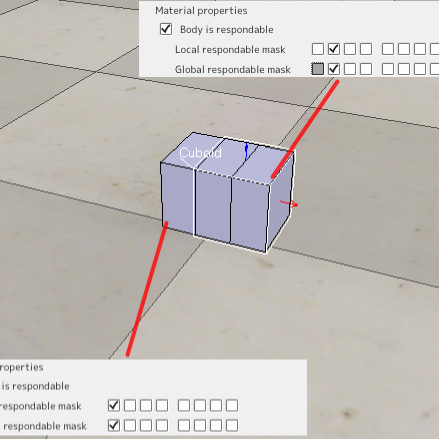
Scene hierarchyのアイコンをダブルクリック -> show dynamic properties -> Materialのプルダウンからusr_を選択しEditを押します。
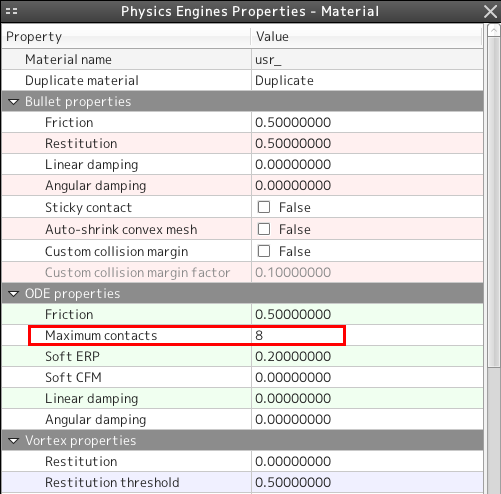
OED propertiesのMaximum contactsの値を変更します。今回は1にしてみます。
シミュレーションを実行してみましょう。
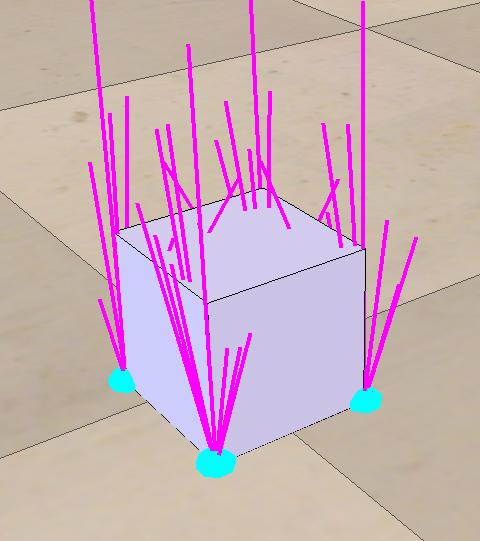
随分とバラついていますが4点判定があるように見えます。ただし、シミュレーションの1サイクルはとても短いため、本当は1点でしか処理していないのにも関わらず4点で接触しているように見えるだけかもしれません。
そこで十分にシミュレーションをコマ送りになるほど遅くしてみます。
ここでは dt=0.10ms、オブジェクトのchild scriptに
|
1 2 3 4 |
i=0 while i<=1000000 do i=i+1 end |
と記述し、実行してみましょう。
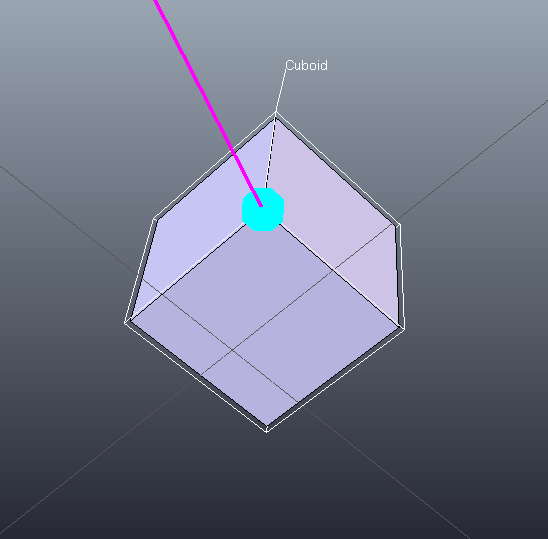
確かに1点だけ接触判定があるようです。
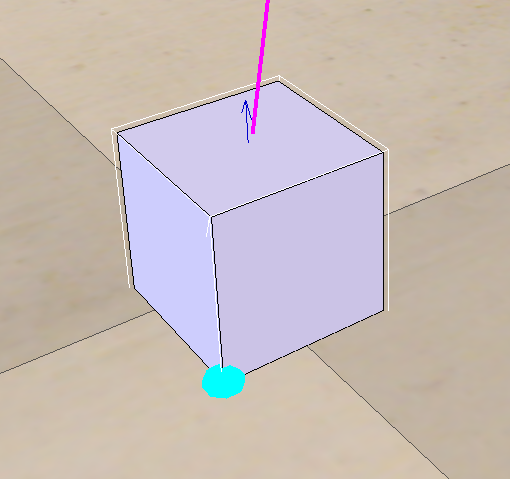
裏側から見ても確かに1点です。
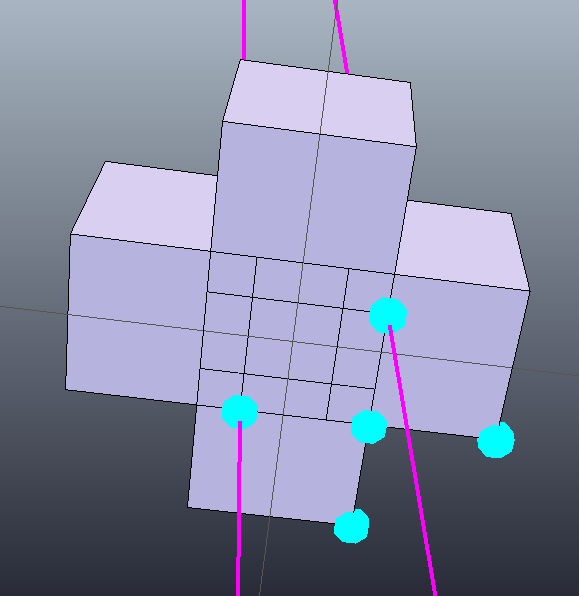
また、オブジェクトをグループ化した場合は、グループ元のそれぞれで接触判定を行なっています。
例えば5つの立方体をグループ化し、Maximum contactsを1とした場合では、5つの判定があります。






コメントを残す